Construindo um radar de penetração no solo para drones com RedPitaya
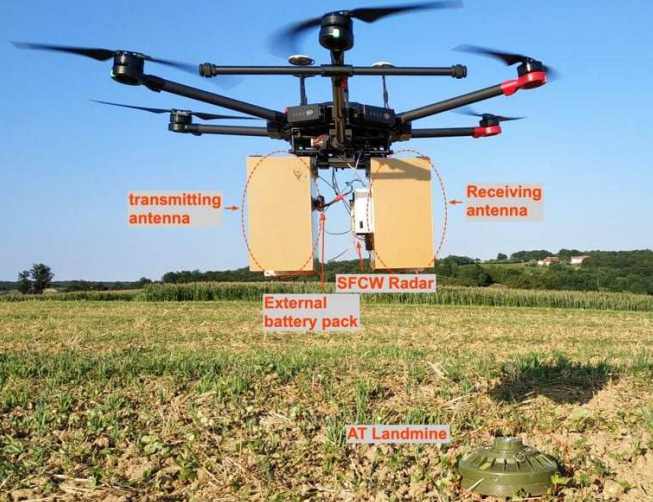
O Red Pitaya foi usado por um grupo de pesquisa da Universidade de Maribor para controlar um radar de penetração no solo de baixo custo acoplado a um hexacóptero com o propósito de detectar minas terrestres. O projeto, que estava em desenvolvimento há três anos, usa o Red Pitaya para processamento de sinal de bordo, manipulação de radar e transmissão de dados para o computador host via protocolo TCP/IP. O obje)vo deste projeto era desenvolver um Radar de Penetração no Solo (GPR) e acoplá-lo a um veículo voador chamado hexacóptero. Dentro deste projeto, a equipe desenvolveu um radar de frequência escalonada (SFCW) e um radar de pulso, que operam em domínios de frequência e tempo, respec) vamente. Ambos os radares foram testados em um campo minado, acoplando-os a um pequeno veículo terrestre e, mais tarde, também a um hexacóptero.
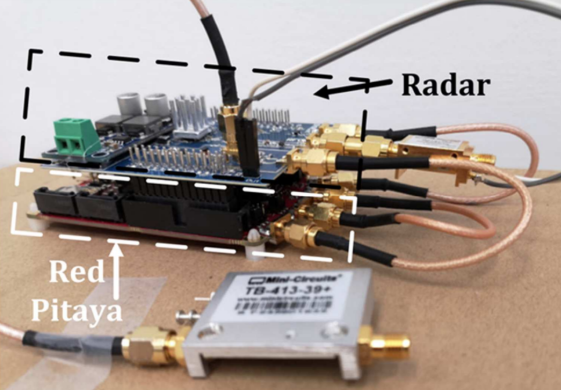
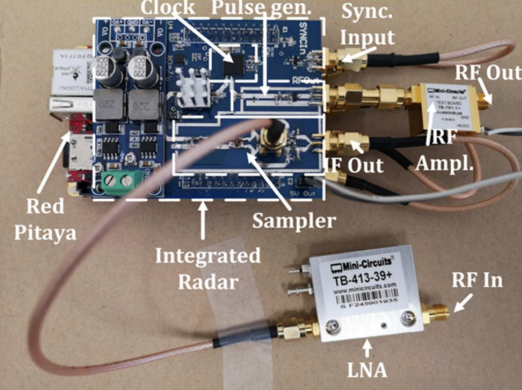
O cronograma proposto para o projeto foi alcançado, e todas as atividades dentro do projeto foram concluídas com sucesso. No primeiro ano deste projeto, os princípios do GPR foram estudados, a fim de entender melhor a interpretação de imagens e implementar um GPR em um Rádio Definido por So7ware (SDR – USRP). Como o dispositivo USRP tem várias limitações de hardware, isso representou a tarefa mais desafiadora. Assim que as simulações com a plataforma USRP forneceram informações úteis sobre a frequência e a faixa de potência adequadas, um design de hardware personalizado foi desenvolvido. Parte disso foi um radar de domínio de frequência, que usa componentes de telecomunicações padrão e opera dentro de uma faixa de frequência de 550 MHz – 2,7 GHz.
O radar usa um princípio de frequência de passo e é capaz de gerar uma varredura de frequência dentro de 10 ms usando 200 passos de frequência. Um radar de domínio de tempo também foi desenvolvido usando o princípio de banda ultralarga (UWB). Os resultados mostram que o radar é adequado quando usado com um veículo terrestre, mas teve um desempenho ruim quando acoplado a um hexacóptero. Isso se deve aos movimentos não uniformes do hexacóptero, que afetam o misturador de amostragem na extremidade frontal do radar. Como o radar SFCW teve um desempenho melhor, isso nos permitiu atualizar o radar existente para um sistema baseado em esparsos. Isso ajudou a reduzir o tempo de varredura, reduzindo o número de etapas de frequência em 40% e, em seguida, usando princípios de detecção compactada para reconstruir o sinal. No terceiro ano do projeto, o so7ware foi desenvolvido para transmitir dados da plataforma do hexacóptero para um PC em tempo real e também para armazenar adicionalmente a bordo. As técnicas de Radar de Abertura Sintética (SAR) também foram implementadas no estágio de pós processamento para obter melhor contraste objeto solo, com resultados satisfatórios. O trabalho atual inclui o uso adicional de dados de GPS, para que o radargrama possa ser geolocalizado, simplificando assim a localização de minas terrestres.
O software final foi testado com um possível usuário final na Academia Militar da República
da Macedônia, e também existe um interesse considerável no centro de desminagem na
Eslovênia.
Aqui você pode ver o hexacóptero em ação ou ler mais sobre o projeto no site oficial.
Aqui = https://www.youtube.com/watch?v=gpB0CZISnkw
Site oficial = hHps://au.feri.um.si/losdv/en/gpr_radar/


Comentários